状态机的实现探讨
Started:
实现一个状态机很容易,但是实现一个好的状态机却不简单。一般实现状态机的时候会有如下的实现代码:
switch (state_)
case A:
do_A();
case B:
do_B();
end switch
当状态量少并且各个状态之间变化的逻辑比较简单时,这种方法无可厚非,但是它有如下缺点:
- 逻辑代码较混乱;如状态A到状态B的切换,如果需要验证有效性,那么代码会变得臃肿,不再那么直观;示例:
case A:
if (current_state != C)
return -1;
else
current_state = A;
return 0;
case
- 难扩展;大部分状态的处理是相似的,而某些特殊的状态则要特殊处理,比如需要提供附加数据, 比如在Task中设定一个状态为suspend,那么需要传递一个要挂起的时间。这种情况类似于GUI程序中的事件通知接口,如:
handle_event(EventId event_, Long ext,...)
ext实际上可以传递任何东西。比如触发了一个文件拖动到图标的事件dropOpen,那么可以将要open的文件路径的地址通过ext传入。 这种方式挺万金油的,所以在实现状态机的时候,完全可以借鉴一下。
Context:
假设场景如下:实现任务Task,它是一个状态机,其状态变化如图:
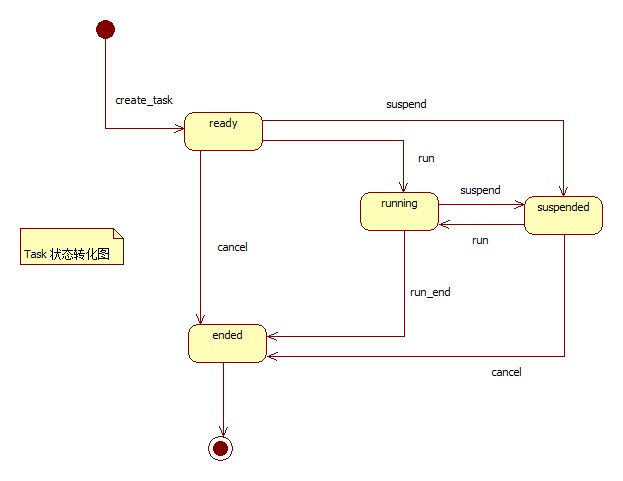
- Task被创建后假设获取了必须资源,进入Ready状态
- Ready状态可以被任务队列执行run, 那么Task进入Running状态
- Ready状态时可以被suspend挂起,挂起时需要标识挂起的时间
- Running状态时可以被挂起
- Suspended状态可以通过润使Task进入running状态
- Running、Ready、Suspended状态都可以通过cancel,直接进入ended状态
Question:
- 合理实现各个状态之间的切换
- 方便扩展,任务状态有可能会增加,任务的触发时间可能会改变等,状态机的实现必须能够快速适应逻辑的变化
Solution:
下面探讨如下的实现方案:
设计基类:
首先是用于传递扩展数据的万金油虚类
#ifndef EVENT_DATA_H
#define EVENT_DATA_H
class EventData
{
public:
virtual ~EventData() {};
void* data() = 0;
};
#endif //EVENT_DATA_H
状态的通用接口类StateMachine 接口, 此类不但定义了接口,其实其规定了状态机实现的模板,任何状态机的实现都可以按照此模板按部就班的实现.
#ifndef STATE_MACHINE_H
#define STATE_MACHINE_H
#include <stdio.h>
#include "EventData.h"
struct StateStruct;
// base class for state machines
class StateMachine
{
public:
StateMachine(int maxStates);
virtual ~StateMachine() {}
protected:
enum { EVENT_IGNORED = 0xFE, CANNOT_HAPPEN };
unsigned char currentState;
void ExternalEvent(unsigned char, EventData* = NULL);
void InternalEvent(unsigned char, EventData* = NULL);
virtual const StateStruct* GetStateMap() = 0;
private:
const int _maxStates;
bool _eventGenerated;
EventData* _pEventData;
void StateEngine(void);
};
typedef void (StateMachine::*StateFunc)(EventData *);
struct StateStruct
{
StateFunc pStateFunc;
};
#define BEGIN_STATE_MAP \
public:\
const StateStruct* GetStateMap() {\
static const StateStruct StateMap[] = {
#define STATE_MAP_ENTRY(entry)\
{ reinterpret_cast<StateFunc>(entry) },
#define END_STATE_MAP \
{ reinterpret_cast<StateFunc>(NULL) }\
}; \
return &StateMap[0]; }
#define BEGIN_TRANSITION_MAP \
static const unsigned char TRANSITIONS[] = {\
#define TRANSITION_MAP_ENTRY(entry)\
entry,
#define END_TRANSITION_MAP(data) \
0 };\
ExternalEvent(TRANSITIONS[currentState], data);
#endif //STATE_MACHINE_H
ExternalEvent接口是带有效性验证的接口,他首先判断状态的有效性,如果有效则调用InternalEvent, InternalEvent是没有验证的内部接口, 它直接的修改状态。
StateMachine 的实现;此实现为通用的逻辑模板,任何状态机的实现都可以套用此模板。
#include <assert.h>
#include "StateMachine.h"
StateMachine::StateMachine(int maxStates) :
_maxStates(maxStates),
currentState(0),
_eventGenerated(false),
_pEventData(NULL)
{
}
// generates an external event. called once per external event
// to start the state machine executing
void StateMachine::ExternalEvent(unsigned char newState,
EventData* pData)
{
// if we are supposed to ignore this event
if (newState == EVENT_IGNORED) {
// just delete the event data, if any
if (pData)
delete pData;
}
else if (newState == CANNOT_HAPPEN) {
//! throw exception("xxx");
//! or
//! logerror("....");
}
else {
// generate the event and execute the state engine
InternalEvent(newState, pData);
StateEngine();
}
}
// generates an internal event. called from within a state
// function to transition to a new state
void StateMachine::InternalEvent(unsigned char newState,
EventData* pData)
{
_pEventData = pData;
_eventGenerated = true;
currentState = newState;
}
// the state engine executes the state machine states
void StateMachine::StateEngine(void)
{
EventData* pDataTemp = NULL;
if (_eventGenerated) {
pDataTemp = _pEventData; // copy of event data pointer
_pEventData = NULL; // event data used up, reset ptr
_eventGenerated = false; // event used up, reset flag
assert(currentState < _maxStates);
// execute the state passing in event data, if any
const StateStruct* pStateMap = GetStateMap();
(this->*pStateMap[currentState].pStateFunc)(pDataTemp);
// if event data was used, then delete it
if (pDataTemp) {
delete pDataTemp;
pDataTemp = NULL;
}
}
}
在这里ExternalEvent判断该状态是否是有效的,如果是EVENT_IGNORED,那么可以直接忽略此操作,如果是CANNOT_HAPPEN,说明出现了逻辑错误。
具体task的实现如下:
#ifndef TASK_H
#define TASK_H
#include "StateMachine.h"
struct TaskData : public EventData
{
int xxx;
};
class Task : public StateMachine
{
public:
Task() : StateMachine(ST_MAX_STATES) {}
// external events taken by this state machine
void Suspend();
void Run();
void Cancel();
private:
// state machine state functions
void ST_Ready();
void ST_Running();
void ST_Suspended(TaskData* pData);
void ST_Ended();
// state map to define state function order
BEGIN_STATE_MAP
STATE_MAP_ENTRY(ST_READY)
STATE_MAP_ENTRY(ST_RUNNING)
STATE_MAP_ENTRY(ST_SUSPENDED)
STATE_MAP_ENTRY(ST_ENDED)
END_STATE_MAP
// state enumeration order must match the order of state
// method entries in the state map
enum E_States {
ST_READY = 0,
ST_RUNNING,
ST_SUSPENDED,
ST_ENDED,
ST_MAX_STATES
};
};
#endif //MOTOR_H
BEGIN_STATE_MAP 宏将自定义的状态函数注册到StateMap中,这样可以直接通过state值索引得到其对应的状态函数。
Task的实现代码
#include <assert.h>
#include "task.h"
void Task::Suspend(MotorData* pData)
{
BEGIN_TRANSITION_MAP // - Current State -
TRANSITION_MAP_ENTRY (ST_Suspended) // ST_READY
TRANSITION_MAP_ENTRY (ST_Suspended) // ST_RUNNING
TRANSITION_MAP_ENTRY (EVENT_IGNORED) // ST_SUSPENDED
TRANSITION_MAP_ENTRY (CANNOT_HAPPEN) // ST_ENDED
END_TRANSITION_MAP(pData)
}
void Task::Run(void)
{
BEGIN_TRANSITION_MAP // - Current State -
TRANSITION_MAP_ENTRY (ST_RUNNING) // ST_READY
TRANSITION_MAP_ENTRY (EVENT_IGNORED) // ST_RUNNING
TRANSITION_MAP_ENTRY (ST_RUNNING) // ST_SUSPENDED
TRANSITION_MAP_ENTRY (CANNOT_HAPPEN) // ST_ENDED
END_TRANSITION_MAP(NULL)
}
void Task::Cancel(void)
{
BEGIN_TRANSITION_MAP // - Current State -
TRANSITION_MAP_ENTRY (ST_ENDED) // ST_READY
TRANSITION_MAP_ENTRY (ST_ENDED) // ST_RUNNING
TRANSITION_MAP_ENTRY (ST_ENDED) // ST_SUSPENDED
TRANSITION_MAP_ENTRY (EVENT_IGNORED) // ST_ENDED
END_TRANSITION_MAP(NULL)
}
void Task::ST_Ready()
{
InternalEvent(ST_READY);
}
void Task::ST_Running()
{
InternalEvent(ST_RUNNING);
}
void Task::ST_Suspended(MotorData* pData)
{
InternalEvent(ST_SUSPENDED, pData);
}
void Task::ST_Ended()
{
InternalEvent(ST_ENDED);
}
总结
在状态的处理上思路是:状态要么是有效的、要么是可以忽略的、要么是根本不会发生的。